
















“ ги обединува младите фотографи од регионот")










")
Истражувачите од Институтот за технологија на Масачусетс објавија дека првпат овозможиле мека роботска рака да биде свесна за својата конфигурација во 3Д-простор, со анализирање на податоците за движење и позиција преку сопствената сензибилизирана кожа. Овој резултат е постигнат со употреба на големи системи со повеќе камери за снимање на движења што им овозможија на роботите повратни информации за нивното 3Д-движење и позиција.
Истражувачите користат дизајн базиран на „киригами“ и метод на фабрикација за креирање меки, пиезорезистивни сензори.
– Меките роботи изработени од висококомпатибилни материјали, слични на оние што се наоѓаат кај живите организми, се сметаат за побезбедни и поприспособливи, еластични и биоинспирирани алтернативи на традиционалните ригидни роботи. Но давањето автономна контрола на овие деформациски роботи е монументална задача, затоа што тие можат да се движат практично во бесконечен број насоки во секој одреден момент. Тоа го отежнува обучувањето на моделите за планирање и контрола што управуваат со автоматизација – велат од Институтот.
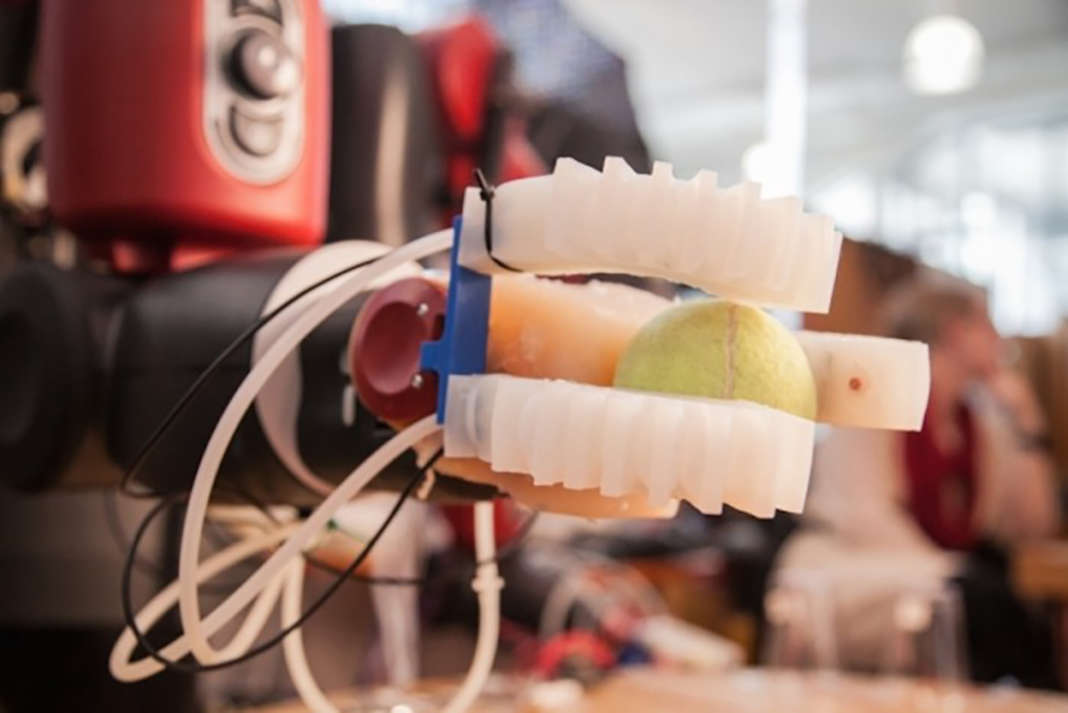
Киригами-сензорите лесно се нанесуваат како сензибилна кожа врз телата на претходно дизајнираните меки роботи. Откако ќе бидат покриени со нив, сензибилната кожа ќе им даде на роботите пропорционалност или свесност за движење и позиција на неговото тело. Овие информации се впуштаат во модел на длабоко учење, кој снима јасни сигнали за да ја процени 3Д-конфигурацијата на роботот. Како што велат научниците, преку ова тие сакаат да постигнат овие меки роботски раце да се ориентираат и контролираат автоматски, да фаќаат, држат и креваат предмети и да комуницираат со светот.
– Ова е прв чекор кон тој вид пософистицирана автоматизирана контрола – велат тие.

